

CLEANFLIGHT INSTALAR LA VERSIÓN ANTERIOR 1.2.4 EN CHROME.

PASO 1:
BIEN, ENTONCES PUEDE INTENTAR INSTALAR EL CONFIGURADOR V1.2.4
1. DESCÁRGUELO COMO ZIP.
2. EXTRAER A UNA CARPETA.
3. INICIE GOOGLE CHROME.
4. HAGA CLIC EN LOS 3 PUNTOS EN EL EXTREMO DERECHO DE LA BARRA DE URL.
5. SELECCIONE MÁS HERRAMIENTAS> EXTENSIONES.
6. MARQUE LA CASILLA DE VERIFICACIÓN MODO DE DESARROLLADOR.
7. HAGA CLIC EN CARGAR EXTENSIÓN DESCOMPRIMIDA.
8. APUNTE A LA CARPETA DONDE EXTRAJO EL ZIP.
9. DEBERÍA VER LA APLICACIÓN CLEANFLIGHT CONFIGURATOR 1.2.4 EN
LAS EXTENSIONES (TENGA EN CUENTA QUE LA VERSIÓN MÁS RECIENTE TAMBIÉN ESTÁ ALLÍ,
EN CASO DE QUE LA NECESITE). HAGA CLIC EN INICIAR.
29 DE MARZO DE 2021.

HACER CLIC EN LA IMAGEN PARA
DESCARGAR: CLEANFLIGHT CONFIGURATOR 1.2.4

PASO 2:
SEGUIR LAS INDICACIONES COMO SE MUESTRA EN EL VIDEO.
DESCARGAR EL CLEANFLIGHT_CC3D.BIN
PARA INSTALAR DESDE LIBREPILOT.
HACER CLIC EN LA
IMAGEN.

DESCARGAR DRIVER
PARA LECTURA DEL PUERTO DE LA CC3D.
( STSW-STM32102 ) HACER CLIC EN LA IMAGEN.

EXPLICACIÓN Y PROCESOS PARA FLASH DE CC3D CON CLEANFLIGHT, VER VIDEO.

WINRAR DOWNLOAD.
HACER CLIC EN LA IMAGEN.
SI ALGUIEN POR CASUALIDAD LLEGA A UTILIZAR UN RADIO CONTROL DE DETRUM CON MINI RECEPTOR ESTABILIZADOR DETRUM MSR66A 2.4G 6CH AQUÍ EL MANUAL PARA DESCARGAR EN INGLÉS Y ESPAÑOL.
HACER CLIC EN LA IMAGEN.
1 ESPAÑOL:


SI LLEGA A UTILIZAR UN RADIO CONTROL DE DETRUM CON MINI RECEPTOR
ESTABILIZADOR DETRUM MSR66A 2.4G 6C ESTA ES LA POSICIÓN CORRECTA DE USAR SOBRE
LA CC3D.
LA CC3D Y EL MINI RECEPTOR ESTABILIZADOR DETRUM MSR66A 2.4G 6CH DEBEN ESTAR EN EL MISMO SENTIDO DE ORIENTACIÓN COMO SE MUESTRA EN LA IMAGEN.

Configuración del hardware CopterControl / CC3D / Atom
Introducción a CopterControl3D (CC3D y Atom) y CopterControl
Los controladores de vuelo CopterControl, CC3D y Atom son todos
tipos de hardware de estabilización que ejecutan el firmware OpenPilot. Se
pueden configurar para volar cualquier fuselaje, desde un ala fija hasta un
octocóptero, utilizando el software OpenPilot Ground Control Station (GCS). Si
aún no ha instalado el software Ground Control, consulte Descarga e instalación de
la estación Ground Control .
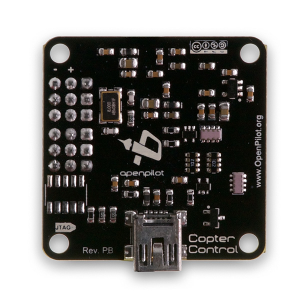
El CopterControl fue la
placa de primera generación, que dejó de fabricarse en 2012 debido a la falta
de disponibilidad de los sensores giroscópicos utilizados para la
estabilización. Luego, el diseño de la placa fue revisado y lanzado con un
sensor giroscópico mejorado que se ve menos afectado por los cambios de
temperatura. Esta revisión se llama CC3D y, aparte del cambio del sensor
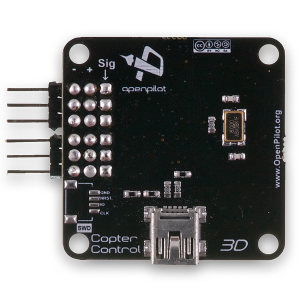
giroscópico, es idéntica al CopterControl original. El Atom es la última
edición de esta familia: tiene la funcionalidad completa del CC3D, pero en un
factor de forma más pequeño y estuvo disponible en agosto de 2014 por
getfvp.com y readymaderc.com.
Las tres placas son 100%
compatibles con la última versión de firmware cuando se actualizan al último
cargador de arranque. Toda la documentación que hace referencia a la placa
CopterControl original es aplicable a las placas CC3D y Atom.
Conociendo tu tabla
CopterControl
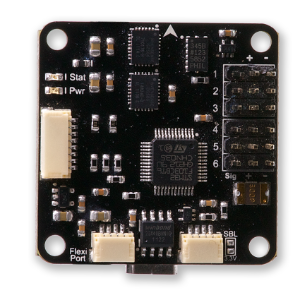
Peso: 8g
CopterControl3D / CC3D
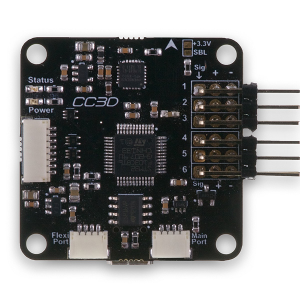
Peso: 8g
El CC3D y el Atom están disponibles con conectores de salida rectos o en ángulo recto.
ÁTOMO
Peso: 4g
El Atom no tiene orificios de montaje. Los estuches diseñados para montar y proteger todos los controladores de vuelo están disponibles en varias fuentes. Por ejemplo, para el Atom, www.readymaderc.com tiene estuches livianos con y sin pies.
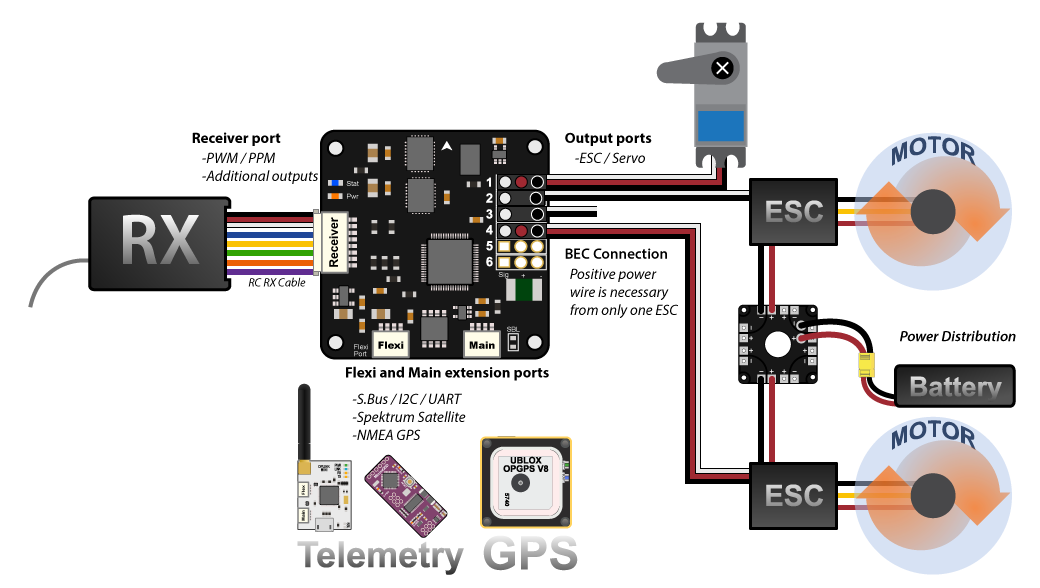
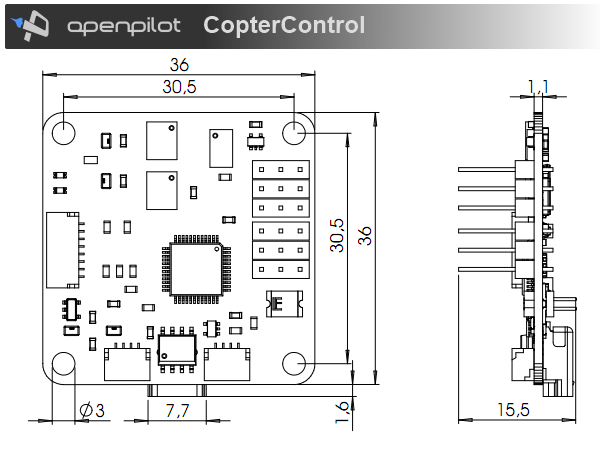
Diagrama de conexión
El diagrama a continuación resume cómo está conectado el sistema CopterControl en general.
Detalles de conexión
Puertos
CopterControl / CC3D / Atom tiene 4 puertos.
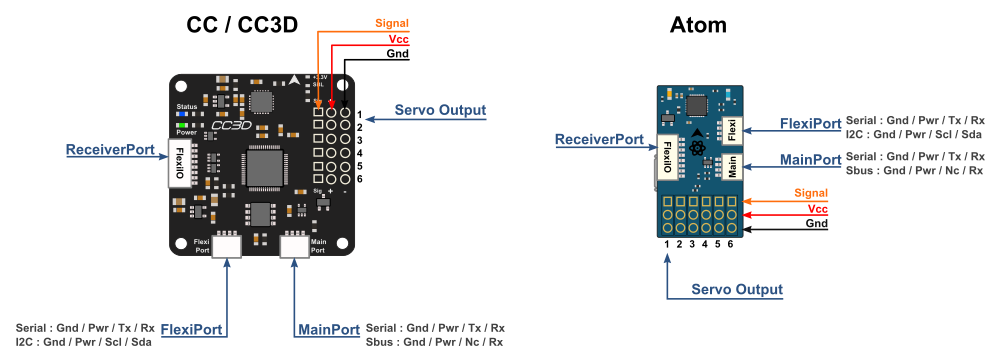
(haga clic en la imagen para verla en tamaño completo)
Salida de servo 1-6 : Estas son las salidas PWM que van a los servos o ESC. Normalmente, la energía se aplica a través de estos encabezados desde solo uno de los ESC. Los pines positivo (Vcc) y negativo (Gnd) se indican en este diagrama y en la placa.
- La disposición de los pines de salida del servo es
- Exterior -> suelo
- Medio -> 5V - 15V
- Interior -> señal
MainPort (también conocido anteriormente como telemetría) : JST-SH de 4 pines. Este es un USART en serie cuya velocidad en baudios se puede ajustar a través del GCS. Opcionalmente, el receptor Futaba S.Bus, el receptor de satélite Spektrum / JR o el GPS se pueden asignar al MainPort. La configuración predeterminada es Telemetría para conectar un módem de RF.
FlexiPort : JST-SH de 4 pines. La función de este puerto también depende de la configuración y se puede configurar para I2C o Serial. La configuración predeterminada no usa este puerto, pero se puede usar para telemetría, GPS, receptores de satélite Spektrum (todos en funcionamiento) y otros periféricos I2C (en desarrollo).
Puerto del receptor : JST-SH de 8 pines. El puerto del receptor puede actuar como un puerto de entrada o salida dependiendo de la configuración que se establezca en la Configuración de hardware. La configuración del puerto del receptor como puerto de salida permite al usuario asignar más canales de salida que las 6 salidas de servo estándar.
El uso de ReceiverPort depende del tipo de receptor RC en uso y de si se desea una salida OneShot125 o PWM Sync:
- PWM
- PWM + NoOneShot debe usarse con un receptor de tipo PWM normal. Los 6 cables más a la derecha del puerto del receptor transportan la señal para cada canal individualmente.
- PPM - Pin 3
- PPM + NoOneShot se utiliza con receptores modernos de tipo PPM, que combinan la señal de control en un cable. El flujo PPM debe enviarse a la primera entrada a través del cable blanco conectado al cable CC ReceiverPort / pin 3. Para un receptor PPM, solo se utiliza un pin para la señal; los cables restantes conectados a los cables CC ReceiverPort 4-8 no se utilizan .
- PPM + PWM + NoOneShot combina los dos modos anteriores, el cable / pin 3 se usa para PPM y el resto, los cables / pines 4-8 se usan como entradas PWM.
- PPM + Outputs + NoOneShot habilita la entrada PPM en el cable ReceiverPort / pin 3 y la salida PWM en los cables / pines 5-8. Estos funcionan como canales de salida 7-10.
- PPM: patilla 8
- PPM_PIN8 + OneShot es un nuevo modo, donde el cable de entrada PPM se mueve desde el pin 3 anterior del ReceiverPort al pin 8 para permitir que PWM Sync y OneShot125 se utilicen como modos de salida ESC.
- PUERTO RECEPTOR COMO SALIDAS
- Outputs + OneShot hace que los pines 5-8 de ReceiverPort funcionen como canales de salida 7-10. Los pines ReceiverPort 3 y 4 no se utilizan. Esta y la opción Desactivado se pueden utilizar si la comunicación de control se realiza a través de un receptor de satélite spektrum o directamente a través de telemetría.
- INHABILITAR
- Disabled + OneShot básicamente deshabilita el ReceiverPort.
Configuración por defecto
De forma predeterminada, el asistente de configuración del vehículo establecerá el puerto del receptor como PPM_PIN8 + OneShot cuando se seleccione el tipo de receptor PPM.
Nota
Tenga en cuenta que la velocidad de salida en los canales de salida del ReceiverPort no se puede configurar individualmente. Si los servos están conectados a estas salidas, debe asegurarse de que puedan funcionar con la tasa de salida definida para el canal vinculado. Por ejemplo, si elige una tasa de salida alta para admitir una configuración de octocóptero, la tasa de actualización de los canales de salida del ReceiverPort está vinculada a la tasa de actualización de los canales 5 y 6. En este caso, no puede conectar servos analógicos a estas salidas ya que un El servo analógico solo admite una velocidad de salida de 50 Hz. Las tasas de salida se establecen en la página de salidas de GCS.
Energía
Advertencia
ASEGÚRESE DE QUE ESTÁ CONECTANDO CORRECTAMENTE POSITIVO Y NEGATIVO.
- CopterControl se puede alimentar de varias formas. A través del puerto USB, a través de los pines de alimentación en los encabezados de los servos o mediante el conector ReceiverPort (consulte la sección de puertos para conocer la ubicación del puerto). Cuando se alimenta mediante USB, los periféricos conectados (receptor, puertos serie, servos, ESC) no se alimentarán para proteger su computadora de un consumo excesivo de corriente a través del USB.
- El voltaje de entrada mínimo permitido para CopterControl es 4.8V, el voltaje de entrada máximo permitido es + 15V.
- Consumo de energía = ± 70 mA.
- Puede conectar el USB y el receptor (con la alimentación) al mismo tiempo.
Precaución
Los pines de salida PWR proporcionan voltaje no regulado a los puertos. Si el CC se alimenta desde una fuente de + 15V (máximo permitido), entonces + 15V estarán en los pines de salida PWR y pueden dañar los receptores conectados, GPS, módems de telemetría u otras tarjetas complementarias.
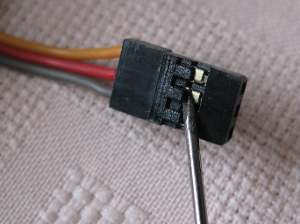
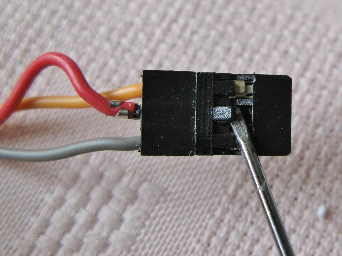
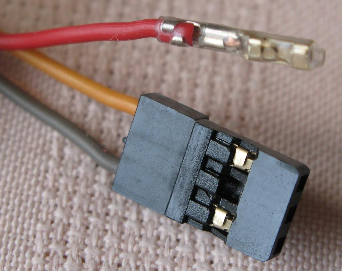
Si alimenta el controlador de vuelo a través de los servo conectores (utilizando la función BEC del controlador de velocidad), el cable de alimentación positivo de un solo ESC es realmente necesario. En la mayoría de los casos, todos los cables pueden dejarse intactos y enchufarse a la placa sin ningún problema. Si tiene problemas con la configuración o sabe con certeza que su modelo de ESC particular lo requiere, puede quitar los pines positivo y negativo de todos menos uno de los conectores de servo ESC. En algunos ESC (muy pocos, en realidad), conectar varios reguladores de voltaje (integrados en los ESC) en paralelo podría causar problemas. Además, en casos raros, la conexión de varios cables de tierra podría causar bucles de tierra, por lo que debe quitar los pines de tierra adicionales solo si experimenta problemas extraños.
Estas fotos muestran cómo quitar y aislar el cable positivo del ESC. Retire el cable positivo y negativo dejando solo el cable de señal conectado para todos menos uno de sus ESC. En este ejemplo se utilizó un destornillador pequeño de hoja plana (o un cuchillo X-Acto) y un tubo termorretráctil de 2 mm. Esta modificación se puede revertir fácilmente quitando el termocontraíble e insertando el cable positivo nuevamente en el enchufe ESC. Además, retire el cable de tierra cuando retire el cable caliente y aísle por separado del cable caliente.
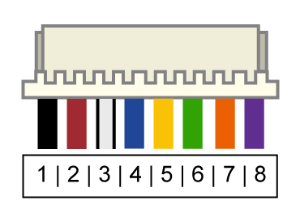
Cables, colores y distribución de pines
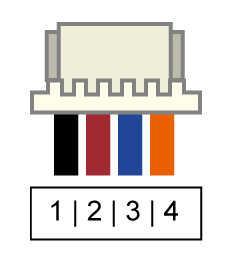
CopterControl utiliza los encabezados de la serie JST-SH . Una placa CopterControl viene de serie con un cable de conexión de 8 pines como se muestra a continuación para conectar su receptor. Además, se suministra un cable JST-SH de 4 pines para conectarse al MainPort o FlexiPort. Puede cortar fácilmente el cable de 4 pines y conectar su telemetría o satélite Spektrum.
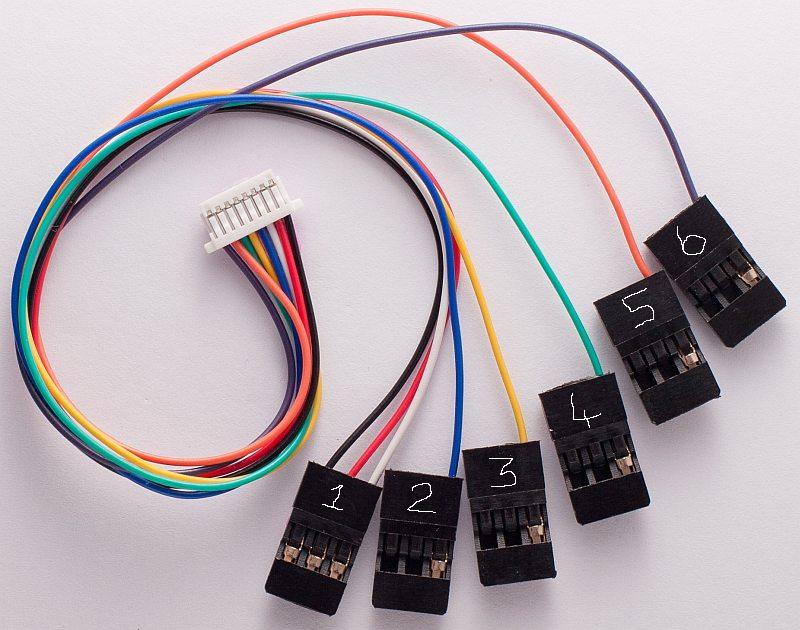
ReceiverPort
| Alfiler | Color | Función PWM + NoOneShot | Función PPM + NoOneShot | Función PPM + PWM + NoOneShot | PPM + Salidas + Función NoOneShot | Función PPM_PIN8 + OneShot | Salidas + Función OneShot |
|---|---|---|---|---|---|---|---|
| 1 | Negro | GND | GND | GND | GND | GND | GND |
| 2 | rojo | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) |
| 3 | blanco | Entrada PWM 1 | Entrada PPM | Entrada PPM | Entrada PPM | - | - |
| 4 | Azul | Entrada PWM 2 | - | Entrada PWM 2 | - | - | - |
| 5 | Amarillo | Entrada PWM 3 | - | Entrada PWM 3 | Salida PWM 7 | - | Salida PWM 7 |
| 6 | Verde | Entrada PWM 4 | - | Entrada PWM 4 | Salida PWM 8 | - | Salida PWM 8 |
| 7 | naranja | Entrada PWM 5 | - | Entrada PWM 5 | Salida PWM 9 | - | Salida PWM 9 |
| 8 | Púrpura | Entrada PWM 6 | - | Entrada PWM 6 | Salida PWM 10 | Entrada PPM | Salida PWM 10 |
Distribución de pines del cable serial MainPort y FlexiPort
| Alfiler | Color | Voltaje | Función serial | Función I2C | Spektrum | S. Bus |
|---|---|---|---|---|---|---|
| 1 | Negro | GND | GND | GND | GND | GND |
| 2 | rojo | 4,8 V - 15 V | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) | Salida PWR (VCC no regulada) |
| 3 | Azul | 3,3 V | TX | SCL | - | - |
| 4 | naranja | 3,3 V (tolerante a 5 V) | RX | SDA | TX (señal) | TX (señal) |
Precaución
El adaptador Spektrum solo debe ser alimentado por 3.3V, se debe usar un adaptador reductor.
Precaución
El voltaje de salida PWR depende del voltaje CC suministrado. Verifique que utiliza el voltaje correcto para su receptor S.BUS.
Conexión del receptor PWM
Hay varias formas de conectar su receptor a CopterControl. Puede conectar cualquier enchufe del cable del receptor CopterControl a cualquier canal de su receptor. El mapeo de canales correcto se realiza en el GCS https://librepilot.atlassian.net/wiki/display/LPDOC/Input+Configuration . Sin embargo, como guía para un receptor PWM estándar, es posible que desee conectarlo de la siguiente manera:
Para Futaba y Hitec
| Canal 1 | AILERON o ROLL | blanco | Señal 1 |
| Canal 2 | ELEV o PITCH | Azul | Señal 2 |
| Canal 3 | ACELERADOR | Amarillo | Señal 3 |
| Canal 4 | TIMÓN | Verde | Señal 4 |
| Canal 5 | GEAR - Modo avión | naranja | Señal 5 |
| Canal 6 | AUX1 | Púrpura | Señal 6 |
Para JR y Spektrum
| Canal 1 | ACELERADOR | blanco | Señal 1 |
| Canal 2 | AILERON o ROLL | Azul | Señal 2 |
| Canal 3 | ELEV o PITCH | Amarillo | Señal 3 |
| Canal 4 | TIMÓN | Verde | Señal 4 |
| Canal 5 | GEAR - Modo avión | naranja | Señal 5 |
| Canal 6 | AUX1 | Púrpura | Señal 6 |
Nota
Si no está seguro del tipo de su receptor (PPM, PWM, Spektrum Satellite ...) o dónde conectarlo, consulte esta página donde se explican las diferentes opciones.
Sensores y componentes
- Matriz de giroscopios de 3 ejes: IDG-500 e ISZ-500 [1]
- Acelerómetro de 3 ejes: ADXL345 [1]
- Admite varias entradas RC comunes: 6 canales PWM, PPM combinados, satélites Spektrum / JR DSM2, DSMJ, DSMX y receptores Futaba S. Bus
- Soporte simultáneo para múltiples receptores
- Funciones ReceiverPort (configurables): 6 canales de entrada PWM o flujo PPM combinado, 4 canales de salida PWM
- Funciones MainPort (configurables): telemetría en serie (predeterminada), GPS, S.Bus, satélites Spektrum / JR
- FlexiPort (configurable): telemetría en serie, GPS, satélites Spektrum / JR o periféricos I2C (en desarrollo)
- 10 salidas PWM a servos o ESC, o para estabilización de cámara
- Estabilización de la cámara: admite soportes de cámara de hasta 3 ejes con estabilización y control manual desde cualquiera de los receptores configurados
- Conectividad USB integrada para una fácil configuración
- Telemetría y configuración USB y en serie (incluida la conexión inalámbrica con módulos de radio opcionales)
- Compatible con el poderoso OpenPilot GCS
- Memoria integrada de 4 Mbit
- Filtro complementario basado en 3C Quaternion funcionando a 500Hz
| [1] | ( 1 , 2 ) En CC3D, el IDG-500, ISZ-500 y ADXL345 se reemplazan por el MPU6000. |
Tableros de bricolaje
Esquemas, diseño de PCB, Gerbers, BOM para CopterControl : CopterControl.zip
Esquemas, diseño de PCB, Gerbers, BOM para CopterControl 3D : CopterControl 3D.zip
Esquemas, diseño de PCB, Gerbers, BOM para Atom : Atom.zip
Otra información
Dimensiones
CopterControl y CC3D utilizaron la huella estándar de OpenPilot y, por lo tanto, tiene las mismas dimensiones y orificios de montaje que las placas OpenPilot Revo, GPS, OSD y PipX.



VALORES PREDETERMINADOS DE CLI; PARA PROBAR CON:
OBTENER ACC_LIMIT_YAW = 100
OBTENER PIDSUM_LIMIT_YAW = 400
PERSONALIZADO; INGRESE EN CLI:
ESTABLECER ACC_LIMIT_YAW = 70
ESTABLECER PIDSUM_LIMIT_YAW = 170
ESTABLECER D_YAW = 8
ITERM_WINDUP = 50 [PREDETERMINADO]
RANGO PERMITIDO: 30 - 100
ITERM_WINDUP = 35
AFINACIÓN DE SALTO DE GUIÑADAPUBLICACIÓN DE CTZSNOOZE:EL SALTO HACIA ARRIBA CUANDO SE DETIENE / INVIERTE ABRUPTAMENTE UN GIRO DE GUIÑADA FUERTE SE DEBE A QUE DOS MOTORES DEBEN PONERSE EN MARCHA A FONDO PARA GENERAR EL PAR MÁXIMO DE GUIÑADA. ESO ES COMO APLICAR UN 50% DE ACELERACIÓN. ACC_LIMIT_YAW [YAW STOP = JUMP] RETRASA LA VELOCIDAD A LA QUE SE PUEDE ACUMULAR LA GUIÑADA, PERO NO LA CANTIDAD MÁXIMA, POR LO QUE, COMO USTED DICE, RETRASA EL INICIO DEL SALTO, PERO SI SE NECESITA UNA GRAN CORRECCIÓN, SEGUIRÁ SALTANDO AL MISMO VELOCIDAD. COMO USTED DICE, RALENTIZAR LA VELOCIDAD DE INICIO DE LOS MOVIMIENTOS DE GUIÑADA USANDO UN ACC_LIMIT_YAW MÁS BAJO REDUCIRÁ LA CAPACIDAD DE RESPUESTA DE GUIÑADA A LAS ENTRADAS DEL STICK. PID_SUM_YAW [INICIO DE GUIÑADA = ASCENSO] LIMITA INDIRECTAMENTE LA VELOCIDAD MÁXIMA QUE SE SOLICITARÁ A LOS MOTORES QUE ALCANCEN DURANTE UN MOVIMIENTO DE GUIÑADA. ESO LIMITARÁ LA VELOCIDAD DE GUIÑADA MÁXIMA POSIBLE Y REDUCIRÁ LA VELOCIDAD DE ASCENSO EN LA MISMA MEDIDA. BÁSICAMENTE, EL SALTO Y LA GUIÑADA ESTÁN INEXTRICABLEMENTE VINCULADOS. PERO ESTO DEBERÍA MANTENER UNA RESPUESTA NÍTIDA DE GUIÑADA PARA LAS ENTRADAS QUE NO LLEGAN AL LÍMITE. VALORES PREDETERMINADOS DE CLI; PARA PROBAR CON:OBTENER ACC_LIMIT_YAW = 100 [CAMBIAR A 80]GET PIDSUM_LIMIT_YAW = 400 [CAMBIAR A 175]
¡VIDEO DE F450 CON CC3D EN SU PRIMER VUELO!
VUELO #1 CON LIBREPILOT.
VUELO #2 CON CLEANFLIGHT
VUELO #3 CON CLEANFLIGHT
EN ESPERA CON LOS P.I.D YA TUNING EN SU GRAN
SALIDA.

CÓMO HACER UN TX SIMULATOR PARA CONECTAR CONTROLADOR DETRUM GAVIN - 6A 6CH RADIO DIGITAL LCD NO TX + RX A COMPUTADORA CON UN CABLE DE AUDIO
CABLE
HERRAMIENTAS:
1 LAPIZ DE SOLDAR SOLDADURA
1 MULTIMETRO
1 PINZAS PARA PELAR CABLE
ES ESTA IMAGEN ESTÁ EL CONECTOR MIDI Y
EN EL MUESTRAN 3 CABLES.
1: NEGRO
2: AMARILLO
3: ROJO
DE LOS CUELES EL NEGRO LA TIERRA (NEGATIVO) Y EL ROJO EL POSITIVO (SEÑAL)
ASÍ COMO SE MUESTRA EN LA IMAGEN

EN LA SIGUIENTE EGMAGEN SE MUESTRAN LA SUELTAS DE LOS CABLES A PUERTO DE AUDIO.

ASI ES
COMO DEBE ESTAR LA SUELDA EN EL CONECTOR DE AUDIO.



AHORA
COMO DEBE ESTAR SOLDADO EL EL CABLE DE AUDIO DE LA PUNTA A Y LA PUNTA B.
ASÍ COMO SE
MUESTRA EN LA IMAGEN SE, ES COMO VA CADA SUELDA Y LOS PUNTOS DE CONTACTOS EN LA
PUNTA (A Y B).


LA PUNTA (A) VA
EN LA ENTRADA DE MICRÓFONO EN LA PC Y LA (B) VA AL RADIO CONTROL.
ASÍ DEBE VERSE EN
RADIO CONTROL TERMINADO.


AQUÍ EL PROGRAMA
PARA PODER HACER FUNCIONAR EL MANDO EN LA PC.
Este programa de instalación le permite instalar SmartPropoPlus. Si
usted
Este programa de instalación es para computadoras de 32 bits (x86) y 64
bits (x64).
Software adicional que puede resultar útil:
DEBES CONECTAR TU CONTROL POR EL PUERTO DE AUDIO CON UN
CABLE MONO. PRIMERO SE CONECTA A TU CONTROL Y LUEGO A LA ENTRADA DEL MICRÓFONO
DE TU COMPUTADORA.
YA TERMINADO.


Formas rápidas de abrir la configuración de los dispositivos de juego en Windows 10.
Si desea instalar un dispositivo de juego o calibrar su joystick, debe acceder a la configuración de los dispositivos de juego. En este tutorial, le mostraremos diferentes formas de abrir la configuración de los dispositivos de juego en Windows 10.
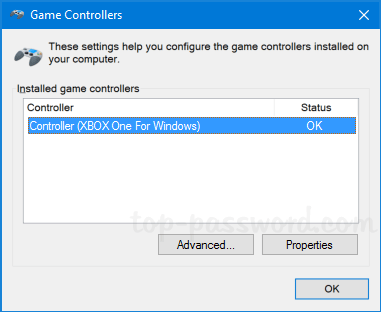
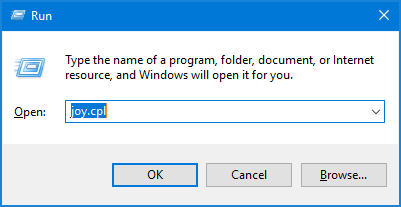
Método 1: Abra la configuración de los dispositivos de juego a través del comando Ejecutar
presione la tecla de Windows y R para que aparezca el comando Ejecutar, escriba joy.cpl y presione Entrar. Esto abrirá la ventana de Dispositivos de juego inmediatamente.
AL FINALIZAR LA DESCARGA E INSTALE TODO CORRECTA MENTE, POR
FAVOR DEJAR SU COMENTARIO PARA SABER QUE TODO ESTA FUNCIONANDO CORRECTAMENTE.










.png)



{kind=link}
0 Comentarios
Gracias por su comentario, es de mucha ayuda y nos ayuda a crecer mas cada día para nuestros usuarios.